上QQ阅读APP看书,第一时间看更新
第3章 时滞非线性汽车悬架建模
第一节 时滞非线性单轮悬架模型
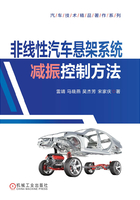
考虑具有控制时滞和测量时滞的非线性二自由度单轮汽车悬架系统如图3.1所示。

图3.1 具有时滞的单轮主动悬架系统
其运动方程为

式中,ms为簧载质量;mu为非簧载质量;k1s为线性的刚度系数;k2s为非线性的刚度系数;bs为悬架阻尼系数;kt为轮胎刚度系数;bt为轮胎阻尼系数;xs(t)为簧载质量的垂直位移;xu(t)为非簧载质量的垂直位移;xr(t)为路面不平度的位移输入;u(t)为施加于悬架系统的主动控制力;τ>0,为控制时滞;σ>0,为测量时滞。定义状态变量:

式中,x1(t)为车轮与车身之间的相对位移,亦称为悬架动挠度;x2(t)为车轮动变形;x3(t)为车身垂直速度;x4(t)为车轮垂直速度。则状态向量为x(t)=[x1(t),x2(t),x3(t),x4(t)]T。
通常评价悬架系统性能的指标有乘坐舒适性、动行程和接地性。对于单轮模型,乘坐舒适性指车身的振动情况,通过车身的垂直振动加速度 来评价;动行程指悬架系统的组成元件(如弹簧、减振器)的压缩和拉伸长度,评价指标为悬架动挠度xs(t)-xu(t);接地性对车辆的操纵稳定性和安全性影响很大,评价指标是车轮的动变形xu(t)-xr(t)。所以,为了使悬架的各项性能指标达到最佳状态,选择控制输出向量为
来评价;动行程指悬架系统的组成元件(如弹簧、减振器)的压缩和拉伸长度,评价指标为悬架动挠度xs(t)-xu(t);接地性对车辆的操纵稳定性和安全性影响很大,评价指标是车轮的动变形xu(t)-xr(t)。所以,为了使悬架的各项性能指标达到最佳状态,选择控制输出向量为

在工程实际中,利用全状态变量评价车辆的控制性能既不经济也不实际。在图3.1所示的模型中,由于动挠度xs(t)-xu(t)和车身速度 可利用传感器测量得到,故选择测量输出向量为
可利用传感器测量得到,故选择测量输出向量为

这样,主动汽车悬架系统式(3.1)可以表示为状态空间表达式:

式中,α(t)为已知的初始函数; ,为以路面的垂直振动速率作为激励的扰动输入,A,b0,g,C,
,为以路面的垂直振动速率作为激励的扰动输入,A,b0,g,C, ,d和f(x)为
,d和f(x)为

